>> P.325
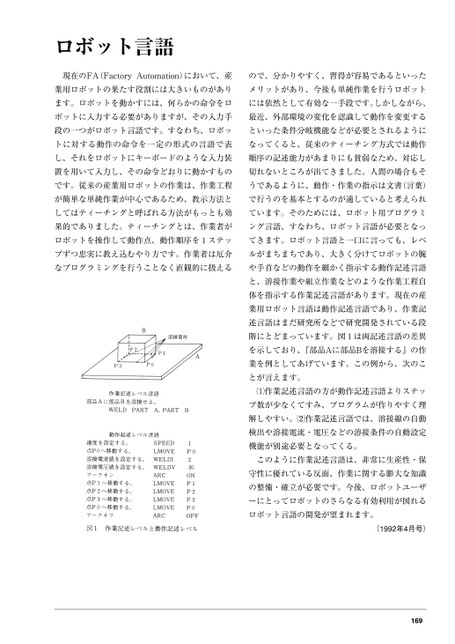
ロボット言語現在のFA(FactoryAutomation)において、産ので、分かりやすく、習得が容易であるといった業用ロボットの果たす役割には大きいものがありメリットがあり、今後も単純作業を行うロボットます。ロボットを動かすには、何らかの命令をロには依然として有効な一手段です。しかしながら、ボットに入力する必要がありますが、その入力手最近、外部環境の変化を認識して動作を変更する段の一つがロボット言語です。すなわち、ロボッといった条件分岐機能などが必要とされるようにトに対する動作の命令を一定の形式の言語で表なってくると、従来のティーチング方式では動作し、それをロボットにキーボードのような入力装順序の記述能力があまりにも貧弱なため、対応し置を用いて入力し、その命令どおりに動かすもの切れないところが出てきました。人間の場合もそです。従来の産業用ロボットの作業は、作業工程うであるように、動作・作業の指示は文書(言葉)が簡単な単純作業が中心であるため、教示方法とで行うのを基本とするのが適していると考えられしてはティーチングと呼ばれる方法がもっとも効ています。そのためには、ロボット用プログラミ果的でありました。ティーチングとは、作業者がング言語、すなわち、ロボット言語が必要となっロボットを操作して動作点、動作順序を1ステッてきます。ロボット言語と一口に言っても、レベプずつ忠実に教え込むやり方です。作業者は厄介ルがまちまちであり、大きく分けてロボットの腕なプログラミングを行うことなく直観的に扱えるや手首などの動作を細かく指示する動作記述言語と、溶接作業や組立作業などのような作業工程自体を指示する作業記述言語があります。現在の産業用ロボット言語は動作記述言語であり、作業記述言語はまだ研究所などで研究開発されている段階にとどまっています。図1は両記述言語の差異を示しており、『部品Aに部品Bを溶接する』の作業を例としてあげています。この例から、次のことが言えます。作業記述言語の方が動作記述言語よりステップ数が少なくてすみ、プログラムが作りやすく理解しやすい。作業記述言語では、溶接線の自動検出や溶接電流・電圧などの溶接条件の自動設定機能が別途必要となってくる。このように作業記述言語は、非常に生産性・保守性に優れている反面、作業に関する膨大な知識の整備・確立が必要です。今後、ロボットユーザーにとってロボットのさらなる有効利用が図れるロボット言語の開発が望まれます。(1992年4月号)169
 | <
| <  |
|  > |
> |  >>
>>