>> P.86
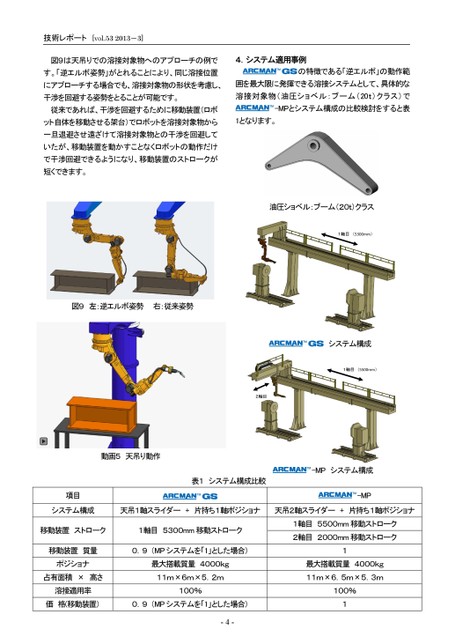
技術レポート[vol.532013-3]図9は天吊りでの溶接対象物へのアプローチの例で4.システム適用事例す。「逆エルボ姿勢」がとれることにより、同じ溶接位置の特徴である「逆エルボ」の動作範にアプローチする場合でも、溶接対象物の形状を考慮し、囲を最大限に発揮できる溶接システムとして、具体的な干渉を回避する姿勢をとることが可能です。溶接対象物(油圧ショベル:ブーム(20t)クラス)で従来であれば、干渉を回避するために移動装置(ロボ-MPとシステム構成の比較検討をすると表ット自体を移動させる架台)でロボットを溶接対象物から1となります。一旦退避させ遠ざけて溶接対象物との干渉を回避していたが、移動装置を動かすことなくロボットの動作だけで干渉回避できるようになり、移動装置のストロークが短くできます。図9左:逆エルボ姿勢右:従来姿勢動画5天吊り動作油圧ショベル:ブーム(20t)クラス1軸目(5300mm)システム構成1軸目(5500mm)2軸目-MPシステム構成天吊2軸スライダー+片持ち1軸ポジショナ1軸目5500mm移動ストローク2軸目2000mm移動ストローク1最大搭載質量4000kg11m×6.5m×5.3m100%1項目-MP表1システム構成比較システム構成移動装置ストローク移動装置質量ポジショナ占有面積×高さ溶接適用率天吊1軸スライダー+片持ち1軸ポジショナ1軸目5300mm移動ストローク0.9(MPシステムを「1」とした場合)最大搭載質量4000kg11m×6m×5.2m100%価格(移動装置)0.9(MPシステムを「1」とした場合)-4-
 | <
| <  |
|  > |
> |  >>
>>