>> P.23
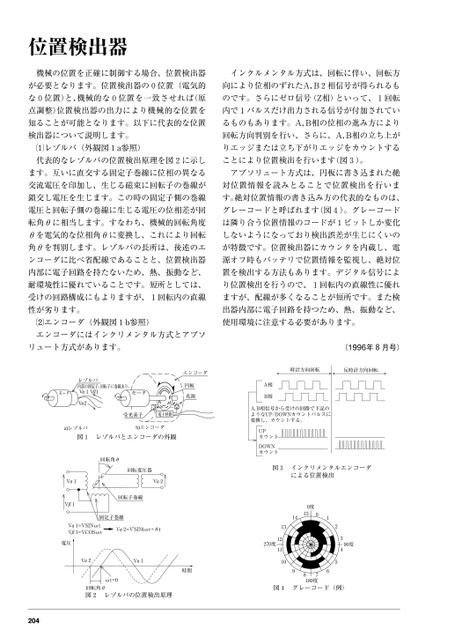
位置検出器機械の位置を正確に制御する場合、位置検出器インクルメンタル方式は、回転に伴い、回転方が必要となります。位置検出器の0位置(電気的向により位相のずれたA,B2相信号が得られるもな0位置)と、機械的な0位置を一致させれば(原のです。さらにゼロ信号(Z相)といって、1回転点調整)位置検出器の出力により機械的な位置を内で1パルスだけ出力される信号が付加されてい知ることが可能となります。以下に代表的な位置るものもあります。A,B相の位相の進み方により検出器について説明します。レゾルバ(外観図1a参照)代表的なレゾルバの位置検出原理を図2に示し回転方向判別を行い、さらに、A,B相の立ち上がりエッジまたは立ち下がりエッジをカウントすることにより位置検出を行います(図3)。ます。互いに直交する固定子巻線に位相の異なるアブソリュート方式は、円板に書き込まれた絶交流電圧を印加し、生じる磁束に回転子の巻線が対位置情報を読みとることで位置検出を行いま鎖交し電圧を生じます。この時の固定子側の巻線す。絶対位置情報の書き込み方の代表的なものは、電圧と回転子側の巻線に生じる電圧の位相差が回グレーコードと呼ばれます(図4)。グレーコード転角θに相当します。すなわち、機械的回転角度は隣り合う位置情報のコードが1ビットしか変化θを電気的な位相角θに変換し、これにより回転しないようになっており検出誤差が生じにくいの角θを判別します。レゾルバの長所は、後述のエが特徴です。位置検出器にカウンタを内蔵し、電ンコーダに比べ省配線であることと、位置検出器源オフ時もバッテリで位置情報を監視し、絶対位内部に電子回路を持たないため、熱、振動など、置を検出する方法もあります。デジタル信号によ耐環境性に優れていることです。短所としては、り位置検出を行うので、1回転内の直線性に優れ受けの回路構成にもよりますが、1回転内の直線ますが、配線が多くなることが短所です。また検性が劣ります。エンコーダ(外観図1b参照)エンコーダにはインクリメンタル方式とアブソリュート方式があります。出器内部に電子回路を持つため、熱、振動など、使用環境に注意する必要があります。(1996年8月号)時計方向回転反時計方向回転レゾルバ内部の固定子、回転子に巻線あり。Vα1Vβ1モータモータエンコーダ円板光源A相B相Vα2受光素子電子回路a)レゾルバb)エンコーダ図1レゾルバとエンコーダの外観回転角θ回転変圧器Vα2回転子巻線Vα1Vβ1固定子巻線Vα1=VSINωtVβ1=VCOSωt電圧Vα2=V'SIN(ωt+θ)Vα2Vα1時間ωt=0回転角θ図2レゾルバの位置検出原理204A,B相信号から受けの回路で下記のようなUP/DOWNカウントパルスに変換し、カウントする。UPカウントDOWNカウント図3インクリメンタルエンコーダによる位置検出0度1501413270度121110987180度16253490度図4グレーコード(例)
 | <
| <  |
|  > |
> |  >>
>>