>> P.76
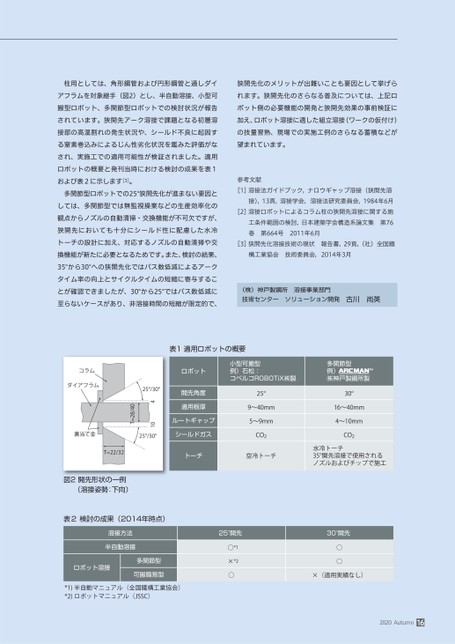
柱用としては、角形鋼管および円形鋼管と通しダイ狭開先化のメリットが出難いことも要因として挙げらアフラムを対象継手(図2)とし、半自動溶接、小型可れます。狭開先化のさらなる普及については、上記ロ搬型ロボット、多関節型ロボットでの検討状況が報告ボット側の必要機能の開発と狭開先効果の事前検証にされています。狭開先アーク溶接で課題となる初層溶加え、ロボット溶接に適した組立溶接(ワークの仮付け)接部の高温割れの発生状況や、シールド不良に起因すの技量習熟、現場での実施工例のさらなる蓄積などがる窒素巻込みによるじん性劣化状況を鑑みた評価がな望まれています。され、実施工での適用可能性が検証されました。適用ロボットの概要と発刊当時における検討の成果を表1および表2に示します[3]。参考文献多関節型ロボットでの25狭開先化が進まない要因としては、多関節型では無監視操業などの生産効率化の観点からノズルの自動清掃・交換機能が不可欠ですが、狭開先においても十分にシールド性に配慮した水冷トーチの設計に加え、対応するノズルの自動清掃や交[1]溶接法ガイドブック,ナロウギャップ溶接(狭開先溶接),13頁,溶接学会,溶接法研究委員会,1984年6月[2]溶接ロボットによるコラム柱の狭開先溶接に関する施工条件範囲の検討,日本建築学会構造系論文集第76巻第664号2011年6月[3]狭開先化溶接技術の現状報告書,29頁,(社)全国鐵換機能が新たに必要となるためです。また、検討の結果、構工業協会技術委員会,2014年3月35から30への狭開先化ではパス数低減によるアークタイム率の向上とサイクルタイムの短縮に寄与することが確認できましたが、30から25ではパス数低減に至らないケースがあり、非溶接時間の短縮が限定的で、(株)神戸製鋼所溶接事業部門技術センターソリューション開発古川尚英表1適用ロボットの概要小型可搬型例)石松:コベルコROBOTiX㈱製多関節型例)㈱神戸製鋼所製3016〜40mm4〜10mmCO2水冷トーチ35開先溶接で使用されるノズルおよびチップで施工T=22/32トーチ空冷トーチ259〜40mm5〜9mmCO2ロボット開先角度適用板厚ルートギャップ25/30410T=28/40コラムダイアフラム裏当て金25/30シールドガス図2開先形状の一例(溶接姿勢:下向)表2検討の成果(2014年時点)溶接方法半自動溶接ロボット溶接多関節型可搬簡易型*1)半自動マニュアル(全国鐵構工業協会)*2)ロボットマニュアル(JSSC)25開先○*1×*2○30開先○○×(適用実績なし)2020Autumn16
 | <
| <  |
|  > |
> |  >>
>>