>> P.178
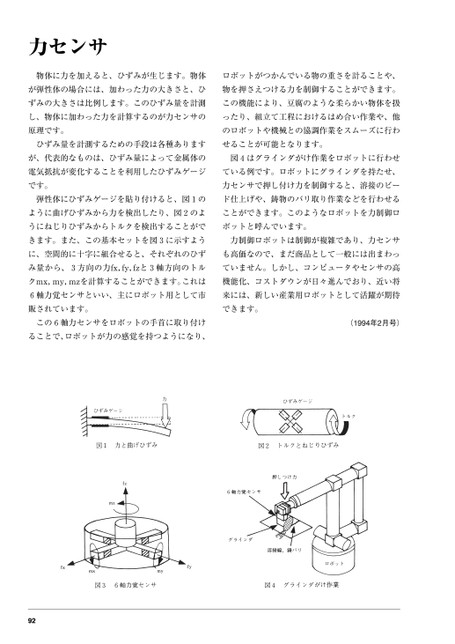
力センサ物体に力を加えると、ひずみが生じます。物体ロボットがつかんでいる物の重さを計ることや、が弾性体の場合には、加わった力の大きさと、ひ物を押さえつける力を制御することができます。ずみの大きさは比例します。このひずみ量を計測この機能により、豆腐のような柔らかい物体を扱し、物体に加わった力を計算するのが力センサのったり、組立て工程におけるはめ合い作業や、他原理です。のロボットや機械との協調作業をスムーズに行わひずみ量を計測するための手段は各種ありますせることが可能となります。が、代表的なものは、ひずみ量によって金属体の図4はグラインダがけ作業をロボットに行わせ電気抵抗が変化することを利用したひずみゲージている例です。ロボットにグラインダを持たせ、です。力センサで押し付け力を制御すると、溶接のビー弾性体にひずみゲージを貼り付けると、図1のド仕上げや、鋳物のバリ取り作業などを行わせるように曲げひずみから力を検出したり、図2のよことができます。このようなロボットを力制御ロうにねじりひずみからトルクを検出することがでボットと呼んでいます。きます。また、この基本セットを図3に示すよう力制御ロボットは制御が複雑であり、力センサに、空間的に十字に組合せると、それぞれのひずも高価なので、まだ商品として一般には出まわっみ量から、3方向の力fx,fy,fzと3軸方向のトルていません。しかし、コンピュータやセンサの高クmx,my,mzを計算することができます。これは機能化、コストダウンが日々進んでおり、近い将6軸力覚センサといい、主にロボット用として市来には、新しい産業用ロボットとして活躍が期待販されています。できます。この6軸力センサをロボットの手首に取り付けることで、ロボットが力の感覚を持つようになり、(1994年2月号)92
 | <
| <  |
|  > |
> |  >>
>>