>> P.181
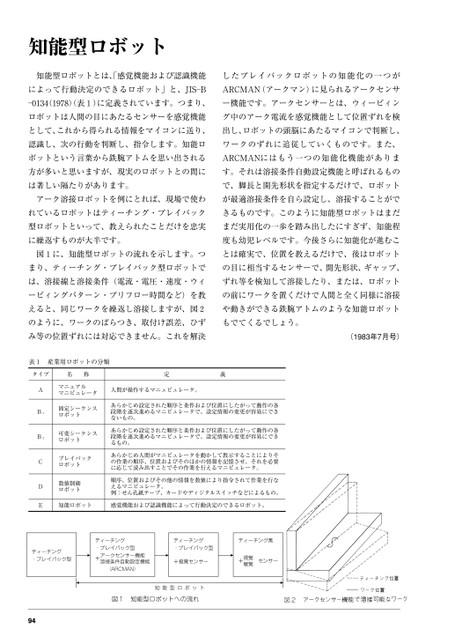
知能型ロボット知能型ロボットとは、感覚機能および認識機能したプレイバックロボットの知能化の一つがによって行動決定のできるロボット」と、JIS―BARCMAN(アークマン)に見られるアークセンサ―01341978)表1)に定義されています。つまり、ー機能です。アークセンサーとは、ウィービィンロボットは人間の目にあたるセンサーを感覚機能グ中のアーク電流を感覚機能として位置ずれを検として、これから得られる情報をマイコンに送り、出し、ロボットの頭脳にあたるマイコンで判断し、認識し、次の行動を判断し、指令します。知能ロワークのずれに追従していくものです。また、ボットという言葉から鉄腕アトムを思い出されるARCMANにはもう一つの知能化機能がありま方が多いと思いますが、現実のロボットとの間にす。それは溶接条件自動設定機能と呼ばれるものは著しい隔たりがあります。で、脚長と開先形状を指定するだけで、ロボットアーク溶接ロボットを例にとれば、現場で使わが最適溶接条件を自ら設定し、溶接することがでれているロボットはティーチング・プレイバックきるものです。このように知能型ロボットはまだ型ロボットといって、教えられたことだけを忠実まだ実用化の一歩を踏み出したにすぎず、知能程に繰返すものが大半です。度も幼児レベルです。今後さらに知能化が進むこ図1に、知能型ロボットの流れを示します。つとは確実で、位置を教えるだけで、後はロボットまり、ティーチング・プレイバック型ロボットでの目に相当するセンサーで、開先形状、ギャップ、は、溶接線と溶接条件(電流・電圧・速度・ウィずれ等を検知して溶接したり、または、ロボットービィングパターン・プリフロー時間など)を教の前にワークを置くだけで人間と全く同様に溶接えると、同じワークを繰返し溶接しますが、図2や動きができる鉄腕アトムのような知能ロボットのように、ワークのばらつき、取付け誤差、ひずもでてくるでしょう。み等の位置ずれには対応できません。これを解決(1983年7月号)表1産業用ロボットの分類タイプ名称定義AB1B2CDマニュアルマニピュレータシ固定ーロボットケンスシ可変ーロボットケンスプレイバックロボット数値制御ロボットE知能ロボット人間が操作するマニュピュレータ。あらかじめ段階ないものを。逐次進設定されたとめるマニピュレ順序条件ータでおよび位置にしたがって、設定情報の変更が動作の各にでき容易あらかじめ段階をるもの逐次進。設定されたとめるマニピュレ順序条件ータでおよび位置にしたがって、設定情報の変更が動作の各にでき容易人間あらかじめのに作業応のじてがマニピュレータを動およびそのほかの行作業を教示記憶することによりそかして必要情報させをえるマニピュレそれをタ、ー。すことでその順序、位置読出み順序、位置えるマニピュレテ例:およびその。、タプーー孔紙せん他の情報を数値により指令されて作業を行なカードやディジタルスイッチなどによるもの。感覚機能および認識機能によって行動決定のできるロボット。ティ・ーチングプレイバック型ーチングティ・プレイバックアクセンサー型ー機能+溶接条件自動設定機能ティ・ーチングプレイバック型+視覚センサー(ARCMAN)図194知能型ロボット知能型ロボットへの流れティーチング無+視覚聴覚センサー
 | <
| <  |
|  > |
> |  >>
>>