>> P.227
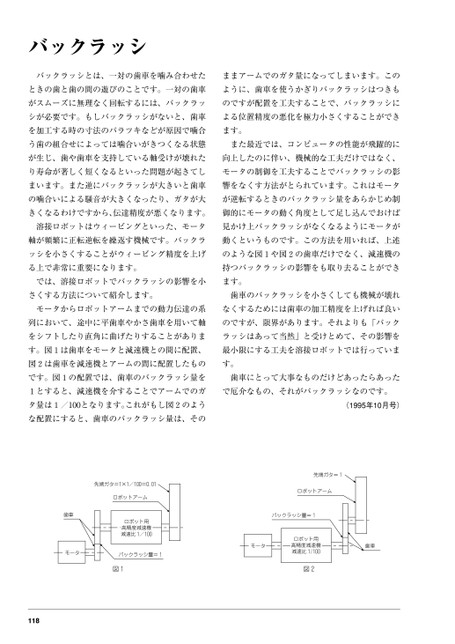
バックラッシバックラッシとは、一対の歯車を噛み合わせたままアームでのガタ量になってしまいます。このときの歯と歯の間の遊びのことです。一対の歯車ように、歯車を使うかぎりバックラッシはつきもがスムーズに無理なく回転するには、バックラッのですが配置を工夫することで、バックラッシにシが必要です。もしバックラッシがないと、歯車よる位置精度の悪化を極力小さくすることができを加工する時の寸法のバラツキなどが原因で噛合ます。う歯の組合せによっては噛合いがきつくなる状態また最近では、コンピュータの性能が飛躍的にが生じ、歯や歯車を支持している軸受けが壊れた向上したのに伴い、機械的な工夫だけではなく、り寿命が著しく短くなるといった問題が起きてしモータの制御を工夫することでバックラッシの影まいます。また逆にバックラッシが大きいと歯車響をなくす方法がとられています。これはモータの噛合いによる騒音が大きくなったり、ガタが大が逆転するときのバックラッシ量をあらかじめ制きくなるわけですから、伝達精度が悪くなります。御的にモータの動く角度として足し込んでおけば溶接ロボットはウィービングといった、モータ見かけ上バックラッシがなくなるようにモータが軸が頻繁に正転逆転を繰返す機械です。バックラ動くというものです。この方法を用いれば、上述ッシを小さくすることがウィービング精度を上げのような図1や図2の歯車だけでなく、減速機のる上で非常に重要になります。持つバックラッシの影響をも取り去ることができでは、溶接ロボットでバックラッシの影響を小ます。さくする方法について紹介します。歯車のバックラッシを小さくしても機械が壊れモータからロボットアームまでの動力伝達の系なくするためには歯車の加工精度を上げれば良い列において、途中に平歯車やかさ歯車を用いて軸のですが、限界があります。それよりも「バックをシフトしたり直角に曲げたりすることがありまラッシはあって当然」と受けとめて、その影響をす。図1は歯車をモータと減速機との間に配置、最小限にする工夫を溶接ロボットでは行っていま図2は歯車を減速機とアームの間に配置したものす。です。図1の配置では、歯車のバックラッシ量を歯車にとって大事なものだけどあったらあった1とすると、減速機を介することでアームでのガで厄介なもの、それがバックラッシなのです。タ量は1/100となります。これがもし図2のような配置にすると、歯車のバックラッシ量は、その(1995年10月号)先端ガタ=×11/100=0.01先端ガタ=1ロボットアーム歯車モータロボット用高精度減速機減速比100/1バックラッシ量=1モータロボットアームバックラッシ量=1ロボット用高精度減速機減速比1/100歯車図1図2118
 | <
| <  |
|  > |
> |  >>
>>