>> P.318
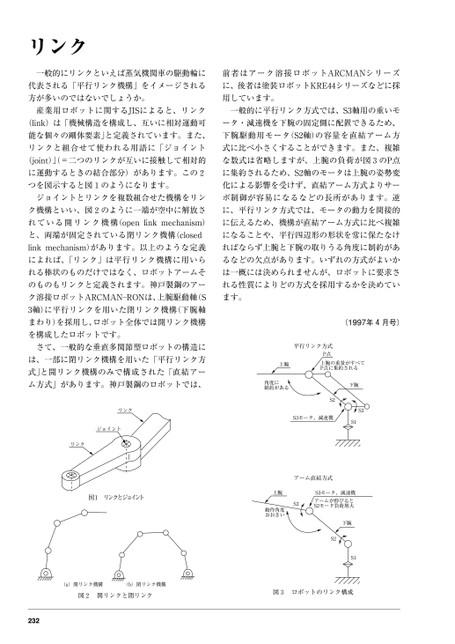
リンク一般的にリンクといえば蒸気機関車の駆動輪に前者はアーク溶接ロボットARCMANシリーズ代表される「平行リンク機構」をイメージされるに、後者は塗装ロボットKRE44シリーズなどに採方が多いのではないでしょうか。用しています。産業用ロボットに関するJISによると、リンク一般的に平行リンク方式では、S3軸用の重いモ(link)は「機械構造を構成し、互いに相対運動可ータ・減速機を下腕の固定側に配置できるため、能な個々の剛体要素」と定義されています。また、下腕駆動用モータ(S2軸)の容量を直結アーム方リンクと組合せて使われる用語に「ジョイント式に比べ小さくすることができます。また、複雑(joint)」=二つのリンクが互いに接触して相対的な数式は省略しますが、上腕の負荷が図3のP点に運動するときの結合部分)があります。この2に集約されるため、S2軸のモータは上腕の姿勢変つを図示すると図1のようになります。化による影響を受けず、直結アーム方式よりサージョイントとリンクを複数組合せた機構をリンボ制御が容易になるなどの長所があります。逆ク機構といい、図2のように一端が空中に解放さに、平行リンク方式では、モータの動力を間接的れている開リンク機構(openlinkmechanism)に伝えるため、機構が直結アーム方式に比べ複雑と、両端が固定されている閉リンク機構(closedになることや、平行四辺形の形状を常に保たなけlinkmechanism)があります。以上のような定義ればならず上腕と下腕の取りうる角度に制約があによれば、「リンク」は平行リンク機構に用いらるなどの欠点があります。いずれの方式がよいかれる棒状のものだけではなく、ロボットアームそは一概には決められませんが、ロボットに要求さのものもリンクと定義されます。神戸製鋼のアーれる性質によりどの方式を採用するかを決めていク溶接ロボットARCMAN―RONは、上腕駆動軸(Sます。3軸)に平行リンクを用いた閉リンク機構(下腕軸まわり)を採用し、ロボット全体では開リンク機構を構成したロボットです。さて、一般的な垂直多関節型ロボットの構造には、一部に閉リンク機構を用いた「平行リンク方式」と開リンク機構のみで構成された「直結アーム方式」があります。神戸製鋼のロボットでは、リンクジョイントリンク図1リンクとジョイント(1997年4月号)平行リンク方式P点上腕上腕の重量がすべてP点に集約される角度に制約があるS2S3モータ、減速機下腕S3S1アーム直結方式上腕動作角度おおきいS3S3モータ、減速機アームが伸びるとS2モータ負荷増大下腕S2S1(a)開リンク機構(b)閉リンク機構図2開リンクと閉リンク図3ロボットのリンク構成232
 | <
| <  |
|  > |
> |  >>
>>