>> P.329
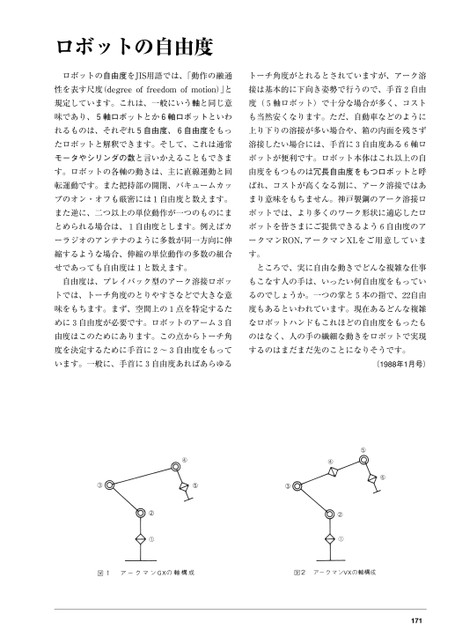
ロボットの自由度ロボットの自由度をJIS用語では、「動作の融通トーチ角度がとれるとされていますが、アーク溶性を表す尺度(degreeoffreedomofmotion)」と接は基本的に下向き姿勢で行うので、手首2自由規定しています。これは、一般にいう軸と同じ意度(5軸ロボット)で十分な場合が多く、コスト味であり、5軸ロボットとか6軸ロボットといわも当然安くなります。ただ、自動車などのようにれるものは、それぞれ5自由度、6自由度をもっ上り下りの溶接が多い場合や、箱の内面を残さずたロボットと解釈できます。そして、これは通常溶接したい場合には、手首に3自由度ある6軸ロモータやシリンダの数と言いかえることもできまボットが便利です。ロボット本体はこれ以上の自す。ロボットの各軸の動きは、主に直線運動と回由度をもつものは冗長自由度をもつロボットと呼転運動です。また把持部の開閉、バキュームカッばれ、コストが高くなる割に、アーク溶接ではあプのオン・オフも厳密には1自由度と数えます。まり意味をもちません。神戸製鋼のアーク溶接ロまた逆に、二つ以上の単位動作が一つのものにまボットでは、より多くのワーク形状に適応したロとめられる場合は、1自由度とします。例えばカボットを皆さまにご提供できるよう6自由度のアーラジオのアンテナのように多数が同一方向に伸ークマンRON,アークマンXLをご用意していま縮するような場合、伸縮の単位動作の多数の組合す。せであっても自由度は1と数えます。ところで、実に自由な動きでどんな複雑な仕事自由度は、プレイバック型のアーク溶接ロボッもこなす人の手は、いったい何自由度をもっていトでは、トーチ角度のとりやすさなどで大きな意るのでしょうか。一つの掌と5本の指で、22自由味をもちます。まず、空間上の1点を特定するた度もあるといわれています。現在あるどんな複雑めに3自由度が必要です。ロボットのアーム3自なロボットハンドもこれほどの自由度をもったも由度はこのためにあります。この点からトーチ角のはなく、人の手の繊細な動きをロボットで実現度を決定するために手首に2〜3自由度をもってするのはまだまだ先のことになりそうです。います。一般に、手首に3自由度あればあらゆる(1988年1月号)171
 | <
| <  |
|  > |
> |  >>
>>