>> P.379
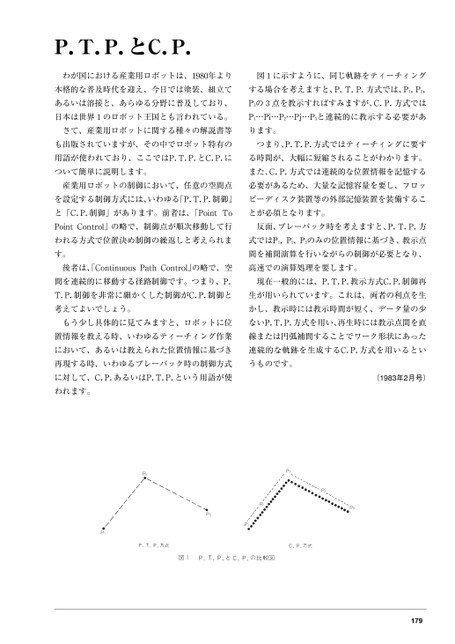
P.T.P.とC.P.わが国における産業用ロボットは、1980年より図1に示すように、同じ軌跡をティーチィング本格的な普及時代を迎え、今日では塗装、組立てする場合を考えますと、P.T.P.方式では、P1,P2,あるいは溶接と、あらゆる分野に普及しており、P3の3点を教示すればすみますが、C.P.方式では日本は世界1のロボット王国とも言われている。P1…Pi…P2…Pj…P3と連続的に教示する必要があさて、産業用ロボットに関する種々の解説書等ります。も出版されていますが、その中でロボット特有のつまり、P.T.P.方式ではティーチィングに要す用語が使われており、ここではP.T.P.とC.P.にる時間が、大幅に短縮されることがわかります。ついて簡単に説明します。また、C.P.方式では連続的な位置情報を記憶する産業用ロボットの制御において、任意の空間点必要があるため、大量な記憶容量を要し、フロッを設定する制御方式には、いわゆる「P.T.P.制御」ピーディスク装置等の外部記憶装置を装備すること「C.P.制御」があります。前者は、「PointToとが必須となります。PointControl」の略で、制御点が順次移動して行反面、プレーバック時を考えますと、P.T.P.方われる方式で位置決め制御の繰返しと考えられま式ではP1,P2,P3のみの位置情報に基づき、教示点す。間を補間演算を行いながらの制御が必要となり、後者は、ContinuousPathControl」の略で、空高速での演算処理を要します。間を連続的に移動する径路制御です。つまり、P.現在一般的には、P.T.P.教示方式C.P.制御再T.P.制御を非常に細かくした制御がC.P.制御と生が用いられています。これは、両者の利点を生考えてよいでしょう。かし、教示時には教示時間が短く、データ量の少もう少し具体的に見てみますと、ロボットに位ないP.T.P.方式を用い、再生時には教示点間を直置情報を教える時、いわゆるティーチィング作業線または円弧補間することでワーク形状にあったにおいて、あるいは教えられた位置情報に基づき連続的な軌跡を生成するC.P.方式を用いるとい再現する時、いわゆるプレーバック時の制御方式うものです。に対して、C.P.あるいはP.T.P.という用語が使(1983年2月号)われます。P2P2P3PiP1PjP3P1179
 | <
| <  |
|  > |
> |  >>
>>