>> P.107
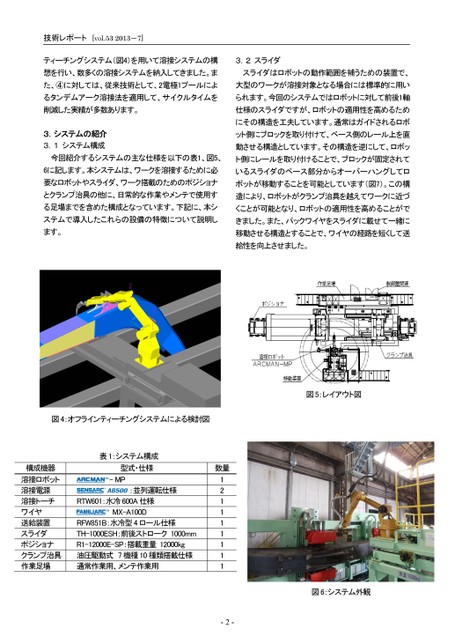
技術レポート[vol.532013-7]ティーチングシステム(図4)を用いて溶接システムの構3.2スライダ想を行い、数多くの溶接システムを納入してきました。まスライダはロボットの動作範囲を補うための装置で、た、④に対しては、従来技術として、2電極1プールによ大型のワークが溶接対象となる場合には標準的に用いるタンデムアーク溶接法を適用して、サイクルタイムをられます。今回のシステムではロボットに対して前後1軸削減した実績が多数あります。仕様のスライダですが、ロボットの適用性を高めるため3.システムの紹介3.1システム構成にその構造を工夫しています。通常はガイドされるロボット側にブロックを取り付けて、ベース側のレール上を直動させる構造としています。その構造を逆にして、ロボッ今回紹介するシステムの主な仕様を以下の表1、図5、ト側にレールを取り付けることで、ブロックが固定されて6に記します。本システムは、ワークを溶接するために必いるスライダのベース部分からオーバーハングしてロ要なロボットやスライダ、ワーク搭載のためのポジショナボットが移動することを可能としています(図7)。この構とクランプ治具の他に、日常的な作業やメンテで使用す造により、ロボットがクランプ治具を越えてワークに近づる足場までを含めた構成となっています。下記に、本シくことが可能となり、ロボットの適用性を高めることがでステムで導入したこれらの設備の特徴について説明しきました。また、パックワイヤをスライダに載せて一緒にます。図4:オフラインティーチングシステムによる検討図構成機器溶接ロボット溶接電源溶接トーチワイヤ送給装置スライダポジショナクランプ治具作業足場表1:システム構成型式・仕様-MP:並列運転仕様RTW601:水冷600A仕様MX-A100DRFW851B:水冷型4ロール仕様TH-1000ESH:前後ストローク1000mmR1-12000E-SP:搭載重量12000kg油圧駆動式7機種10種類搭載仕様通常作業用、メンテ作業用移動させる構造とすることで、ワイヤの経路を短くして送給性を向上させました。数量121111111-2-図5:レイアウト図図6:システム外観
 | <
| <  |
|  > |
> |  >>
>>