>> P.178
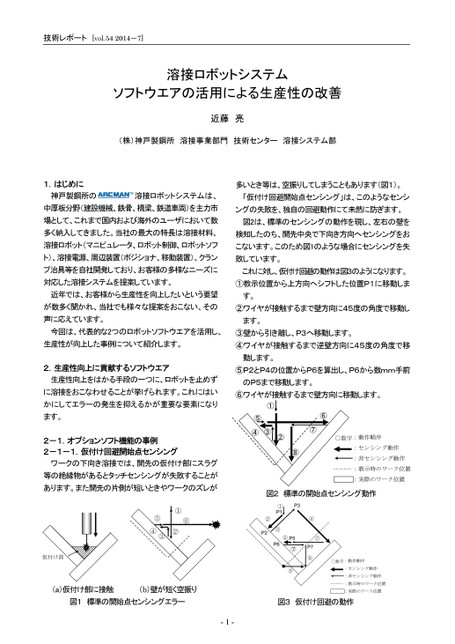
近藤亮(株)神戸製鋼所溶接事業部門技術センター溶接システム部1.はじめに多いとき等は、空振りしてしまうこともあります(図1)。神戸製鋼所の溶接ロボットシステムは、「仮付け回避開始点センシング」は、このようなセンシ中厚板分野(建設機械、鉄骨、橋梁、鉄道車両)を主力市ングの失敗を、独自の回避動作にて未然に防ぎます。場として、これまで国内および海外のユーザにおいて数図2は、標準のセンシングの動作を現し、左右の壁を多く納入してきました。当社の最大の特長は溶接材料、検知したのち、開先中央で下向き方向へセンシングをお溶接ロボット(マニピュレータ、ロボット制御、ロボットソフこないます。このため図1のような場合にセンシングを失ト)、溶接電源、周辺装置(ポジショナ、移動装置)、クラン敗しています。プ治具等を自社開発しており、お客様の多様なニーズにこれに対し、仮付け回避の動作は図3のようになります。対応した溶接システムを提案しています。①教示位置から上方向へシフトした位置P1に移動しま近年では、お客様から生産性を向上したいという要望す。が数多く聞かれ、当社でも様々な提案をおこない、その②ワイヤが接触するまで壁方向に45度の角度で移動し声に応えています。ます。今回は、代表的な2つのロボットソフトウエアを活用し、③壁から引き離し、P3へ移動します。生産性が向上した事例について紹介します。④ワイヤが接触するまで逆壁方向に45度の角度で移動します。2.生産性向上に貢献するソフトウエア生産性向上をはかる手段の一つに、ロボットを止めずに溶接をおこなわせることが挙げられます。これにはいかにしてエラーの発生を抑えるかが重要な要素になります。2-1.オプションソフト機能の事例2-1-1.仮付け回避開始点センシングワークの下向き溶接では、開先の仮付け部にスラグ等の絶縁物があるとタッチセンシングが失敗することがあります。また開先の片側が短いときやワークのズレが仮付け部⑤①⑥④③②(a)仮付け部に接触(b)壁が短く空振り図1標準の開始点センシングエラー⑤P2とP4の位置からP6を算出し、P6から数mm手前のP5まで移動します。⑥ワイヤが接触するまで壁方向に移動します。①⑤④③②⑥⑦⑧○数字:動作順序:センシング動作:非センシング動作:教示時のワーク位置:実際のワーク位置図2標準の開始点センシング動作②P2①P1③P6P3⑥P5⑦⑨④P7⑧P8⑤P4○数字:動作順序:センシング動作:非センシング動作:教示時のワーク位置:実際のワーク位置図3仮付け回避の動作-1-技術レポート[vol.542014-7]溶接ロボットシステムソフトウエアの活用による生産性の改善
 | <
| <  |
|  > |
> |  >>
>>