>> P.206
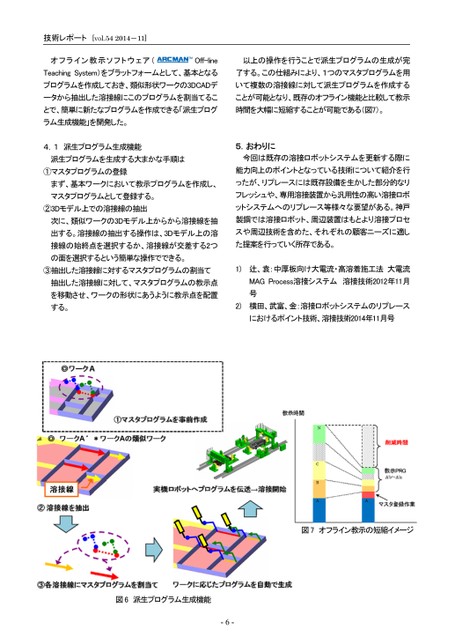
辻、袁:中厚板向け大電流・高溶着施工法大電流MAGProcess溶接システム溶接技術2012年11月号横田、武富、金:溶接ロボットシステムのリプレースにおけるポイント技術、溶接技術2014年11月号図7オフライン教示の短縮イメージ)12)た提案を行っていく所存である。図6派生プログラム生成機能-6-技術レポート[vol.542014-11]オフライン教示ソフトウェア(Off-line以上の操作を行うことで派生プログラムの生成が完TeachingSystem)をプラットフォームとして、基本となる了する。この仕組みにより、1つのマスタプログラムを用プログラムを作成しておき、類似形状ワークの3DCADデいて複数の溶接線に対して派生プログラムを作成するータから抽出した溶接線にこのプログラムを割当てるこことが可能となり、既存のオフライン機能と比較して教示とで、簡単に新たなプログラムを作成できる「派生プログ時間を大幅に短縮することが可能である(図7)。ラム生成機能」を開発した。4.1派生プログラム生成機能5.おわりに派生プログラムを生成する大まかな手順は①マスタプログラムの登録今回は既存の溶接ロボットシステムを更新する際に能力向上のポイントとなっている技術について紹介を行まず、基本ワークにおいて教示プログラムを作成し、ったが、リプレースには既存設備を生かした部分的なリマスタプログラムとして登録する。②3Dモデル上での溶接線の抽出フレッシュや、専用溶接装置から汎用性の高い溶接ロボットシステムへのリプレース等様々な要望がある。神戸次に、類似ワークの3Dモデル上からから溶接線を抽製鋼では溶接ロボット、周辺装置はもとより溶接プロセ出する。溶接線の抽出する操作は、3Dモデル上の溶スや周辺技術を含めた、それぞれの顧客ニーズに適し接線の始終点を選択するか、溶接線が交差する2つの面を選択するという簡単な操作でできる。③抽出した溶接線に対するマスタプログラムの割当て抽出した溶接線に対して、マスタプログラムの教示点を移動させ、ワークの形状にあうように教示点を配置する。
 | <
| <  |
|  > |
> |  >>
>>