>> P.7
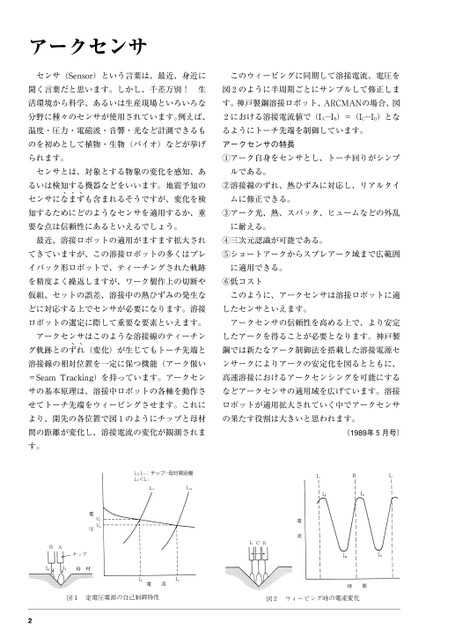
アークセンサセンサ(Sensor)という言葉は、最近、身近にこのウィービングに同期して溶接電流、電圧を聞く言葉だと思います。しかし、千差万別!生図2のように半周期ごとにサンプルして修正しま活環境から科学、あるいは生産現場といろいろなす。神戸製鋼溶接ロボット、ARCMANの場合、図分野に種々のセンサが使用されています。例えば、2における溶接電流値で(IA―IB)=(IC―ID)とな温度・圧力・電磁波・音響・光など計測できるもるようにトーチ先端を制御しています。のを初めとして植物・生物(バイオ)などが挙げアークセンサの特長られます。①アーク自身をセンサとし、トーチ回りがシンプセンサとは、対象とする物象の変化を感知、あルである。るいは検知する機器などをいいます。地震予知の②溶接線のずれ、熱ひずみに対応し、リアルタイも含まれるそうですが、変化を検ムに修正できる。ずまセンサにな知するためにどのようなセンサを適用するか、重③アーク光、熱、スパッタ、ヒュームなどの外乱要な点は信頼性にあるといえるでしょう。に耐える。最近、溶接ロボットの適用がますます拡大され④三次元認識が可能である。てきていますが、この溶接ロボットの多くはプレ⑤ショートアークからスプレアーク域まで広範囲イバック形ロボットで、ティーチングされた軌跡に適用できる。を精度よく繰返しますが、ワーク製作上の切断や⑥低コスト仮組、セットの誤差、溶接中の熱ひずみの発生なこのように、アークセンサは溶接ロボットに適どに対応する上でセンサが必要になります。溶接したセンサといえます。ロボットの選定に際して重要な要素といえます。アークセンサの信頼性を高める上で、より安定アークセンサはこのような溶接線のティーチンしたアークを得ることが必要となります。神戸製グ軌跡とのず(変化)が生じてもトーチ先端と鋼では新たなアーク制御法を搭載した溶接電源セれ溶接線の相対位置を一定に保つ機能(アーク倣いンサークによりアークの安定化を図るとともに、=SeamTracking)を持っています。アークセン高速溶接におけるアークセンシングを可能にするサの基本原理は、溶接中ロボットの各軸を動作さなどアークセンサの適用域を広げています。溶接せてトーチ先端をウィービングさせます。これにロボットが適用拡大されていく中でアークセンサより、開先の各位置で図1のようにチップと母材の果たす役割は大きいと思われます。間の距離が変化し、溶接電流の変化が観測されま(1989年5月号)L0,L1;チップ─母材間距離L0<L1す。2
 | <
| <  |
|  > |
> |  >>
>>