>> P.27
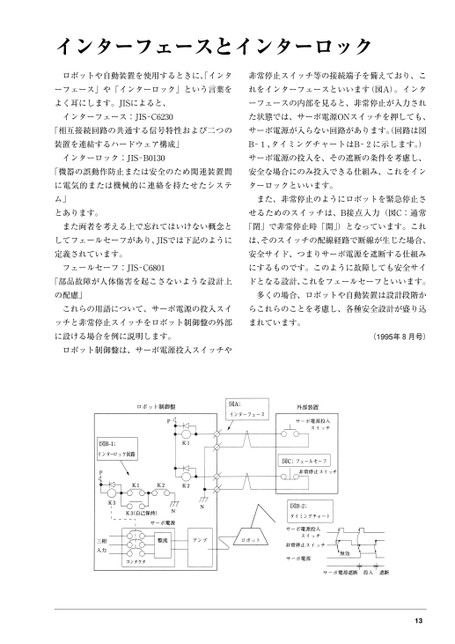
インターフェースとインターロックロボットや自動装置を使用するときに、インタ非常停止スイッチ等の接続端子を備えており、こーフェース」や「インターロック」という言葉をれをインターフェースといいます(図A)。インタよく耳にします。JISによると、インターフェース:JIS-C6230ーフェースの内部を見ると、非常停止が入力された状態では、サーボ電源ONスイッチを押しても、「相互接続回路の共通する信号特性および二つのサーボ電源が入らない回路があります。回路は図装置を連結するハードウェア構成」B-1、タイミングチャートはB-2に示します。)インターロック:JIS-B0130サーボ電源の投入を、その遮断の条件を考慮し、「機器の誤動作防止または安全のため関連装置間安全な場合にのみ投入できる仕組み、これをインに電気的または機械的に連絡を持たせたシステターロックといいます。ム」とあります。また、非常停止のようにロボットを緊急停止させるためのスイッチは、B接点入力(図C:通常また両者を考える上で忘れてはいけない概念と「閉」で非常停止時「開」)となっています。これしてフェールセーフがあり、JISでは下記のようには、そのスイッチの配線経路で断線が生じた場合、定義されています。安全サイド、つまりサーボ電源を遮断する仕組みフェールセーフ:JIS-C6801にするものです。このように故障しても安全サイ「部品故障が人体傷害を起こさないような設計上ドとなる設計、これをフェールセーフといいます。の配慮」多くの場合、ロボットや自動装置は設計段階かこれらの用語について、サーボ電源の投入スイらこれらのことを考慮し、各種安全設計が盛り込ッチと非常停止スイッチをロボット制御盤の外部まれています。に設ける場合を例に説明します。ロボット制御盤は、サーボ電源投入スイッチや(1995年8月号)13
 | <
| <  |
|  > |
> |  >>
>>