>> P.50
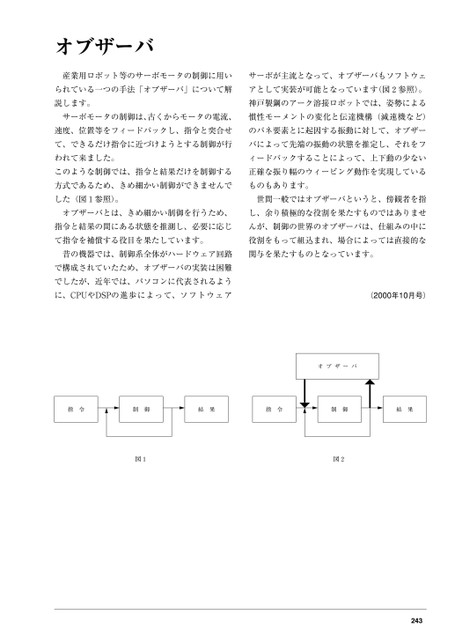
オブザーバ産業用ロボット等のサーボモータの制御に用いサーボが主流となって、オブザーバもソフトウェられている一つの手法「オブザーバ」について解アとして実装が可能となっています(図2参照)。説します。神戸製鋼のアーク溶接ロボットでは、姿勢によるサーボモータの制御は、古くからモータの電流、慣性モーメントの変化と伝達機構(減速機など)速度、位置等をフィードバックし、指令と突合せのバネ要素とに起因する振動に対して、オブザーて、できるだけ指令に近づけようとする制御が行バによって先端の振動の状態を推定し、それをフわれて来ました。ィードバックすることによって、上下動の少ないこのような制御では、指令と結果だけを制御する正確な振り幅のウィービング動作を実現している方式であるため、きめ細かい制御ができませんでものもあります。した(図1参照)。世間一般ではオブザーバというと、傍観者を指オブザーバとは、きめ細かい制御を行うため、し、余り積極的な役割を果たすものではありませ指令と結果の間にある状態を推測し、必要に応じんが、制御の世界のオブザーバは、仕組みの中にて指令を補償する役目を果たしています。役割をもって組込まれ、場合によっては直接的な昔の機器では、制御系全体がハードウェア回路関与を果たすものとなっています。で構成されていたため、オブザーバの実装は困難でしたが、近年では、パソコンに代表されるように、CPUやDSPの進歩によって、ソフトウェア(2000年10月号)オブザーバ指令制御結果指令制御結果図1図2243
 | <
| <  |
|  > |
> |  >>
>>