>> P.64
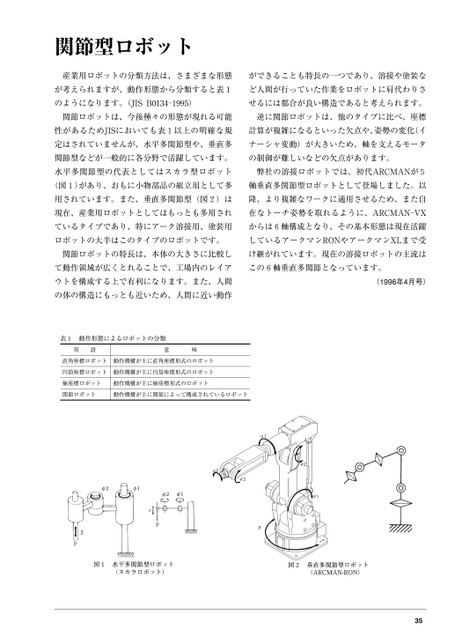
関節型ロボット産業用ロボットの分類方法は、さまざまな形態ができることも特長の一つであり、溶接や塗装なが考えられますが、動作形態から分類すると表1ど人間が行っていた作業をロボットに肩代わりさのようになります。(JISB0134―1995)せるには都合が良い構造であると考えられます。関節ロボットは、今後種々の形態が現れる可能逆に関節ロボットは、他のタイプに比べ、座標性があるためJISにおいても表1以上の明確な規計算が複雑になるといった欠点や、姿勢の変化(イ定はされていませんが、水平多関節型や、垂直多ナーシャ変動)が大きいため、軸を支えるモータ関節型などが一般的に各分野で活躍しています。の制御が難しいなどの欠点があります。水平多関節型の代表としてはスカラ型ロボット弊社の溶接ロボットでは、初代ARCMANが5(図1)があり、おもに小物部品の組立用として多軸垂直多関節型ロボットとして登場しました。以用されています。また、垂直多関節型(図2)は降、より複雑なワークに適用させるため、また自現在、産業用ロボットとしてはもっとも多用され在なトーチ姿勢を取れるように、ARCMAN―VXているタイプであり、特にアーク溶接用、塗装用からは6軸構成となり、その基本形態は現在活躍ロボットの大半はこのタイプのロボットです。しているアークマンRONやアークマンXLまで受関節ロボットの特長は、本体の大きさに比較しけ継がれています。現在の溶接ロボットの主流はて動作領域が広くとれることで、工場内のレイアこの6軸垂直多関節となっています。ウトを構成する上で有利になります。また、人間の体の構造にもっとも近いため、人間に近い動作(1996年4月号)表1動作形態によるロボットの分類用語直角座標ロボット円筒座標ロボット極座標ロボット関節ロボット意味動作機構が主に直角座標形式のロボット動作機構が主に円筒座標形式のロボット動作機構が主に極座標形式のロボット動作機構されているロボットが主に関節によって構成35
 | <
| <  |
|  > |
> |  >>
>>