>> P.85
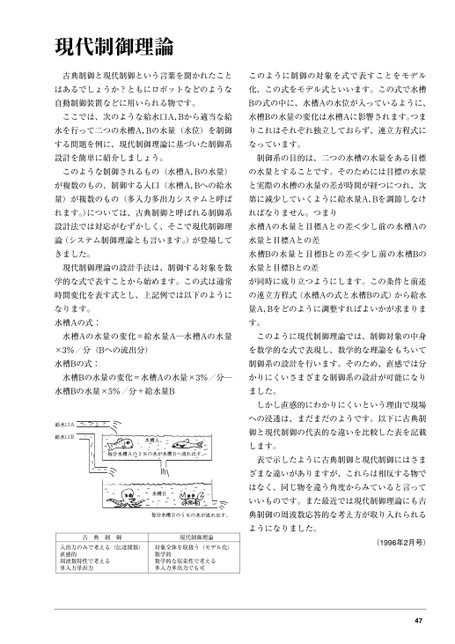
現代制御理論古典制御と現代制御という言葉を聞かれたことこのように制御の対象を式で表すことをモデルはあるでしょうか?ともにロボットなどのような化、この式をモデル式といいます。この式で水槽自動制御装置などに用いられる物です。Bの式の中に、水槽Aの水位が入っているように、ここでは、次のような給水口A,Bから適当な給水槽Bの水量の変化は水槽Aに影響されます。つま水を行って二つの水槽A,Bの水量(水位)を制御りこれはそれぞれ独立しておらず、連立方程式にする問題を例に、現代制御理論に基づいた制御系なっています。設計を簡単に紹介しましょう。制御系の目的は、二つの水槽の水量をある目標このような制御されるもの(水槽A,Bの水量)の水量とすることです。そのためには目標の水量が複数のもの、制御する入口(水槽A,Bへの給水と実際の水槽の水量の差が時間が経つにつれ、次量)が複数のもの(多入力多出力システムと呼ば第に減少していくように給水量A,Bを調節しなけれます。)については、古典制御と呼ばれる制御系ればなりません。つまり設計法では対応がむずかしく、そこで現代制御理水槽Aの水量と目標Aとの差<少し前の水槽Aの論(システム制御理論とも言います。)が登場して水量と目標Aとの差きました。水槽Bの水量と目標Bとの差<少し前の水槽Bの現代制御理論の設計手法は、制御する対象を数水量と目標Bとの差学的な式で表すことから始めます。この式は通常が同時に成り立つようにします。この条件と前述時間変化を表す式とし、上記例では以下のようにの連立方程式(水槽Aの式と水槽Bの式)から給水なります。水槽Aの式:量A,Bをどのように調整すればよいかが求まります。水槽Aの水量の変化=給水量A―水槽Aの水量このように現代制御理論では、制御対象の中身×3%/分(Bへの流出分)水槽Bの式:を数学的な式で表現し、数学的な理論をもちいて制御系の設計を行います。そのため、直感では分水槽Bの水量の変化=水槽Aの水量×3%/分―かりにくいさまざまな制御系の設計が可能になり水槽Bの水量×5%/分+給水量Bました。しかし直感的にわかりにくいという理由で現場への浸透は、まだまだのようです。以下に古典制御と現代制御の代表的な違いを比較した表を記載します。表で示したように古典制御と現代制御にはさまざまな違いがありますが、これらは相反する物ではなく、同じ物を違う角度からみていると言っていいものです。また最近では現代制御理論にも古典制御の周波数応答的な考え方が取り入れられるようになりました。(1996年2月号)47古典制御現代制御理論考える(伝達関数)取扱う(モデル化)のみで入出力直感的で周波数特性単入力単出力考えるを対象全体数学的数学的多入力多出力な収束性ででも考可える
 | <
| <  |
|  > |
> |  >>
>>