>> P.172
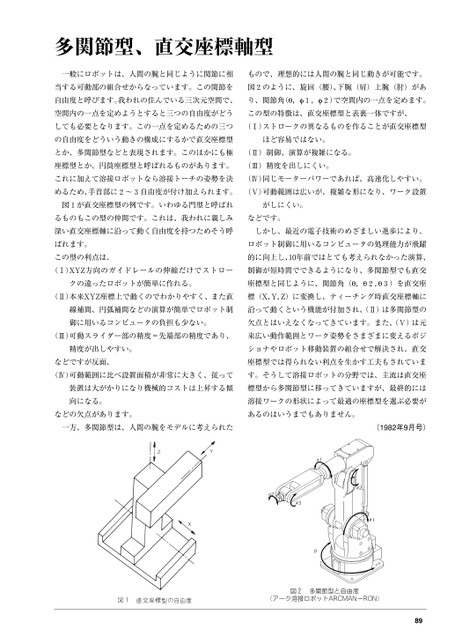
多関節型、直交座標軸型一般にロボットは、人間の腕と同じように関節に相もので、理想的には人間の腕と同じ動きが可能です。当する可動部の組合せからなっています。この関節を図2のように、旋回(腰)、下腕(肩)上腕(肘)があ自由度と呼びます。我われの住んでいる三次元空間で、り、関節角(θ,φ1,φ2)で空間内の一点を定めます。空間内の一点を定めようとすると三つの自由度がどうこの型の特徴は、直交座標型と表裏一体ですが、しても必要となります。この一点を定めるための三つ(Ⅰ)ストロークの異なるものを作ることが直交座標型の自由度をどういう動きの構成にするかで直交座標型ほど容易ではない。とか、多関節型などと表現されます。このほかにも極(Ⅱ)制御、演算が複雑になる。座標型とか、円筒座標型と呼ばれるものがあります。(Ⅲ)精度を出しにくい。これに加えて溶接ロボットなら溶接トーチの姿勢を決(Ⅳ)同じモーターパワーであれば、高速化しやすい。めるため、手首部に2〜3自由度が付け加えられます。(Ⅴ)可動範囲は広いが、複雑な形になり、ワーク設置図1が直交座標型の例です。いわゆる門型と呼ばれがしにくい。るものもこの型の仲間です。これは、我われに親しみなどです。深い直交座標軸に沿って動く自由度を持つためそう呼しかし、最近の電子技術のめざましい進歩により、ばれます。この型の利点は、ロボット制御に用いるコンピュータの処理能力が飛躍的に向上し、10年前ではとても考えられなかった演算、(Ⅰ)XYZ方向のガイドレールの伸縮だけでストロー制御が短時間でできるようになり、多関節型でも直交クの違ったロボットが簡単に作れる。座標型と同じように、関節角(θ,θ2,θ3)を直交座(Ⅱ)本来XYZ座標上で動くのでわかりやすく、また直標(X,Y,Z)に変換し、ティーチング時直交座標軸に線補間、円弧補間などの演算が簡単でロボット制沿って動くという機能が付加され、(Ⅱ)は多関節型の御に用いるコンピュータの負担も少ない。欠点とはいえなくなってきています。また、(Ⅴ)は元(Ⅲ)可動スライダー部の精度=先端部の精度であり、来広い動作範囲とワーク姿勢をさまざまに変えるポジ精度が出しやすい。などですが反面、ショナやロボット移動装置の組合せで解決され、直交座標型では得られない利点を生かす工夫もされていま(Ⅳ)可動範囲に比べ設置面積が非常に大きく、従ってす。そうして溶接ロボットの分野では、主流は直交座装置は大がかりになり機械的コストは上昇する傾標型から多関節型に移ってきていますが、最終的には向になる。などの欠点があります。溶接ワークの形状によって最適の座標型を選ぶ必要があるのはいうまでもありません。一方、多関節型は、人間の腕をモデルに考えられた(1982年9月号)図2多関節型と自由度(アーク溶接ロボットARCMAN-RON)89
 | <
| <  |
|  > |
> |  >>
>>