>> P.184
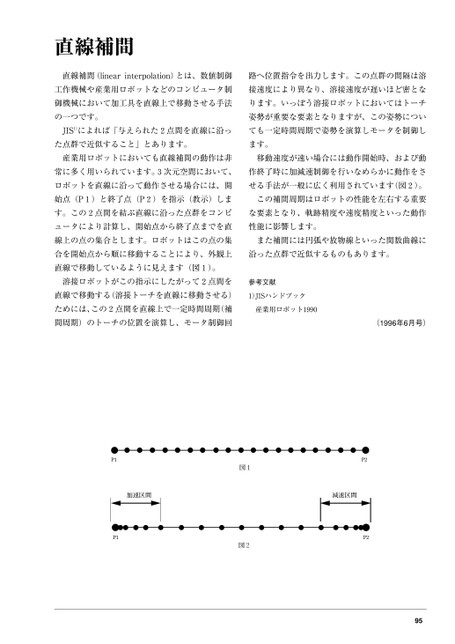
直線補間直線補間(linearinterpolation)とは、数値制御路へ位置指令を出力します。この点群の間隔は溶工作機械や産業用ロボットなどのコンピュータ制接速度により異なり、溶接速度が遅いほど密とな御機械において加工具を直線上で移動させる手法ります。いっぽう溶接ロボットにおいてはトーチの一つです。姿勢が重要な要素となりますが、この姿勢についJIS1)によれば「与えられた2点間を直線に沿っても一定時間周期で姿勢を演算しモータを制御した点群で近似すること」とあります。ます。産業用ロボットにおいても直線補間の動作は非移動速度が速い場合には動作開始時、および動常に多く用いられています。3次元空間において、作終了時に加減速制御を行いなめらかに動作をさロボットを直線に沿って動作させる場合には、開せる手法が一般に広く利用されています(図2)。始点(P1)と終了点(P2)を指示(教示)しまこの補間周期はロボットの性能を左右する重要す。この2点間を結ぶ直線に沿った点群をコンピな要素となり、軌跡精度や速度精度といった動作ュータにより計算し、開始点から終了点までを直性能に影響します。線上の点の集合とします。ロボットはこの点の集また補間には円弧や放物線といった関数曲線に合を開始点から順に移動することにより、外観上沿った点群で近似するものもあります。直線で移動しているように見えます(図1)。溶接ロボットがこの指示にしたがって2点間を参考文献直線で移動する(溶接トーチを直線に移動させる)1)JISハンドブックためには、この2点間を直線上で一定時間周期(補産業用ロボット1990間周期)のトーチの位置を演算し、モータ制御回(1996年6月号)加速区間P1P1図1図2減速区間P2P295
 | <
| <  |
|  > |
> |  >>
>>