>> P.197
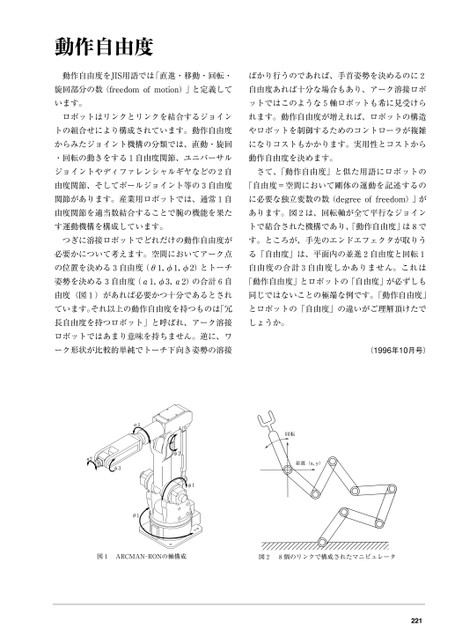
動作自由度動作自由度をJIS用語では「直進・移動・回転・ばかり行うのであれば、手首姿勢を決めるのに2旋回部分の数(freedomofmotion)」と定義して自由度あれば十分な場合もあり、アーク溶接ロボいます。ットではこのような5軸ロボットも希に見受けらロボットはリンクとリンクを結合するジョインれます。動作自由度が増えれば、ロボットの構造トの組合せにより構成されています。動作自由度やロボットを制御するためのコントローラが複雑からみたジョイント機構の分類では、直動・旋回になりコストもかかります。実用性とコストから・回転の動きをする1自由度関節、ユニバーサル動作自由度を決めます。ジョイントやディファレンシャルギヤなどの2自さて、「動作自由度」と似た用語にロボットの由度関節、そしてボールジョイント等の3自由度「自由度=空間において剛体の運動を記述するの関節があります。産業用ロボットでは、通常1自に必要な独立変数の数(degreeoffreedom)」が由度関節を適当数結合することで腕の機能を果たあります。図2は、回転軸が全て平行なジョインす運動機構を構成しています。トで結合された機構であり、「動作自由度」は8でつぎに溶接ロボットでどれだけの動作自由度がす。ところが、手先のエンドエフェクタが取りう必要かについて考えます。空間においてアーク点る「自由度」は、平面内の並進2自由度と回転1の位置を決める3自由度(θ1,φ1,φ2)とトーチ自由度の合計3自由度しかありません。これは姿勢を決める3自由度(α1,φ3,α2)の合計6自「動作自由度」とロボットの「自由度」が必ずしも由度(図1)があれば必要かつ十分であるとされ同じではないことの極端な例です。「動作自由度」ています。それ以上の動作自由度を持つものは「冗とロボットの「自由度」の違いがご理解頂けたで長自由度を持つロボット」と呼ばれ、アーク溶接しょうか。ロボットではあまり意味を持ちません。逆に、ワーク形状が比較的単純でトーチ下向き姿勢の溶接(1996年10月号)α2φ3α1θ1φ2φ1回転並進(x,y)図1ARCMAN―RONの軸構成図28個のリンクで構成されたマニピュレータ221
 | <
| <  |
|  > |
> |  >>
>>