>> P.209
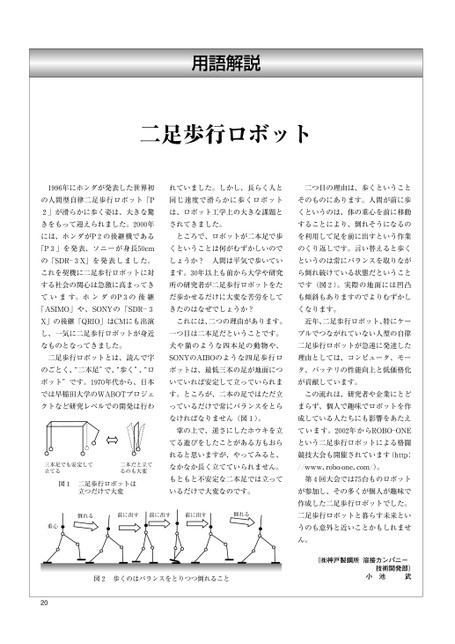
用語解説二足歩行ロボット1996年にホンダが発表した世界初れていました。しかし、長らく人と二つ目の理由は、歩くということの人間型自律二足歩行ロボット「P同じ速度で滑らかに歩くロボットそのものにあります。人間が前に歩2」が滑らかに歩く姿は、大きな驚は、ロボット工学上の大きな課題とくというのは、体の重心を前に移動きをもって迎えられました。2000年されてきました。することにより、倒れそうになるのには、ホンダがP2の後継機であるところで、ロボットが二本足で歩を利用して足を前に出すという作業「P3」を発表、ソニーが身長50cmくということは何がむずかしいのでのくり返しです。言い替えると歩くの「SDR―3X」を発表しました。しょうか?人間は平気で歩いていというのは常にバランスを取りながこれを契機に二足歩行ロボットに対ます。30年以上も前から大学や研究ら倒れ続けている状態だということする社会の関心は急激に高まってき所の研究者が二足歩行ロボットをたです(図2)。実際の地面には凹凸ています。ホンダのP3の後継だ歩かせるだけに大変な苦労をしても傾斜もありますのでよりむずかし「ASIMO」や、SONYの「SDR―3きたのはなぜでしょうか?くなります。X」の後継「QRIO」はCMにも出演これには、二つの理由があります。近年、二足歩行ロボット、特にケーし、一気に二足歩行ロボットが身近一つ目は二本足だということです。ブルでつながれていない人型の自律なものとなってきました。犬や猫のような四本足の動物や、二足歩行ロボットが急速に発達した二足歩行ロボットとは、読んで字SONYのAIBOのような四足歩行ロ理由としては、コンピュータ、モーのごとく、“二本足”で、“歩く”、“ロボットは、最低三本の足が地面につタ、バッテリの性能向上と低価格化ボット”です。1970年代から、日本いていれば安定して立っていられまが貢献しています。では早稲田大学のWABOTプロジェす。ところが、二本の足ではただ立この流れは、研究者や企業にとどクトなど研究レベルでの開発は行わっているだけで常にバランスをとらまらず、個人で趣味でロボットを作なければなりません(図1)。成している人たちにも影響をあたえ掌の上で、逆さにしたホウキを立ています。2002年からROBO―ONEてる遊びをしたことがある方もおらという二足歩行ロボットによる格闘れると思いますが、やってみると、競技大会も開催されています(http:三本足でも安定して立てる二本だと立てるのも大変なかなか長く立てていられません。//www.robo-one.com/)。図1二足歩行ロボットは立つだけで大変もともと不安定な二本足では立って第4回大会では75台ものロボットいるだけで大変なのです。が参加し、その多くが個人が趣味で倒れる前に出す前に出す前に出す倒れる図2歩くのはバランスをとりつつ倒れること重心20作成した二足歩行ロボットでした。二足歩行ロボットと暮らす未来というのも意外と近いことかもしれません。(㈱神戸製鋼所溶接カンパニー技術開発部)小池武
 | <
| <  |
|  > |
> |  >>
>>