>> P.249
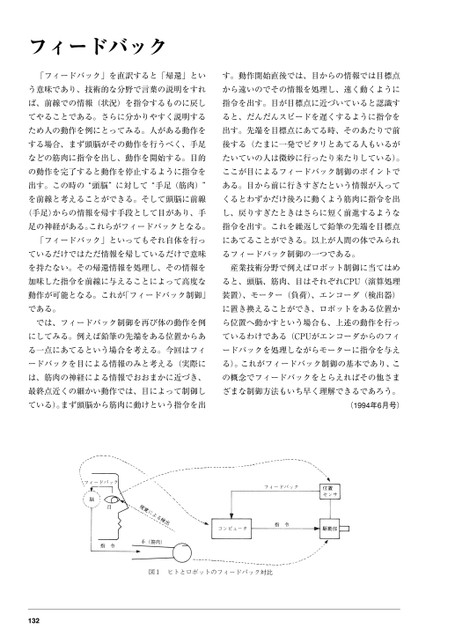
フィードバック「フィードバック」を直訳すると「帰還」といす。動作開始直後では、目からの情報では目標点う意味であり、技術的な分野で言葉の説明をすれから遠いのでその情報を処理し、速く動くようにば、前線での情報(状況)を指令するものに戻し指令を出す。目が目標点に近づいていると認識すてやることである。さらに分かりやすく説明するると、だんだんスピードを遅くするように指令をため人の動作を例にとってみる。人がある動作を出す。先端を目標点にあてる時、そのあたりで前する場合、まず頭脳がその動作を行うべく、手足後する(たまに一発でピタリとあてる人もいるがなどの筋肉に指令を出し、動作を開始する。目的たいていの人は微妙に行ったり来たりしている)。の動作を完了すると動作を停止するように指令をここが目によるフィードバック制御のポイントで出す。この時の“頭脳”に対して“手足(筋肉)”ある。目から前に行きすぎたという情報が入ってを前線と考えることができる。そして頭脳に前線くるとわずかだけ後ろに動くよう筋肉に指令を出(手足)からの情報を帰す手段として目があり、手し、戻りすぎたときはさらに短く前進するような足の神経がある。これらがフィードバックとなる。指令を出す。これを繰返して鉛筆の先端を目標点「フィードバック」といってもそれ自体を行っにあてることができる。以上が人間の体でみられているだけではただ情報を帰しているだけで意味るフィードバック制御の一つである。を持たない。その帰還情報を処理し、その情報を産業技術分野で例えばロボット制御に当てはめ加味した指令を前線に与えることによって高度なると、頭脳、筋肉、目はそれぞれCPU(演算処理動作が可能となる。これが「フィードバック制御」装置)、モーター(負荷)、エンコーダ(検出器)である。に置き換えることができ、ロボットをある位置かでは、フィードバック制御を再び体の動作を例ら位置へ動かすという場合も、上述の動作を行っにしてみる。例えば鉛筆の先端をある位置からあているわけである(CPUがエンコーダからのフィる一点にあてるという場合を考える。今回はフィードバックを処理しながらモーターに指令を与えードバックを目による情報のみと考える(実際にる)。これがフィードバック制御の基本であり、こは、筋肉の神経による情報でおおまかに近づき、の概念でフィードバックをとらえればその他さま最終点近くの細かい動作では、目によって制御しざまな制御方法もいち早く理解できるであろう。ている)。まず頭脳から筋肉に動けという指令を出(1994年6月号)132
 | <
| <  |
|  > |
> |  >>
>>