>> P.262
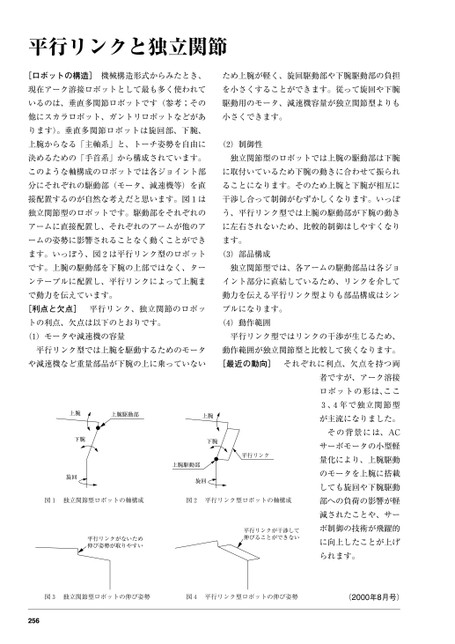
平行リンクと独立関節[ロボットの構造]機械構造形式からみたとき、ため上腕が軽く、旋回駆動部や下腕駆動部の負担現在アーク溶接ロボットとして最も多く使われてを小さくすることができます。従って旋回や下腕いるのは、垂直多関節ロボットです(参考;その駆動用のモータ、減速機容量が独立関節型よりも他にスカラロボット、ガントリロボットなどがあ小さくできます。ります)。垂直多関節ロボットは旋回部、下腕、上腕からなる「主軸系」と、トーチ姿勢を自由に(2)制御性決めるための「手首系」から構成されています。独立関節型のロボットでは上腕の駆動部は下腕このような軸構成のロボットでは各ジョイント部に取付いているため下腕の動きに合わせて振られ分にそれぞれの駆動部(モータ、減速機等)を直ることになります。そのため上腕と下腕が相互に接配置するのが自然な考えだと思います。図1は干渉し合って制御がむずかしくなります。いっぽ独立関節型のロボットです。駆動部をそれぞれのう、平行リンク型では上腕の駆動部が下腕の動きアームに直接配置し、それぞれのアームが他のアに左右されないため、比較的制御はしやすくなりームの姿勢に影響されることなく動くことができます。ます。いっぽう、図2は平行リンク型のロボット(3)部品構成です。上腕の駆動部を下腕の上部ではなく、ター独立関節型では、各アームの駆動部品は各ジョンテーブルに配置し、平行リンクによって上腕まイント部分に直結しているため、リンクを介してで動力を伝えています。動力を伝える平行リンク型よりも部品構成はシン[利点と欠点]平行リンク、独立関節のロボップルになります。トの利点、欠点は以下のとおりです。(4)動作範囲(1)モータや減速機の容量平行リンク型ではリンクの干渉が生じるため、平行リンク型では上腕を駆動するためのモータ動作範囲が独立関節型と比較して狭くなります。や減速機など重量部品が下腕の上に乗っていない[最近の動向]それぞれに利点、欠点を持つ両上腕上腕駆動部下腕旋回上腕下腕上腕駆動部旋回平行リンク図1独立関節型ロボットの軸構成図2平行リンク型ロボットの軸構成平行リンクがないため伸び姿勢が取りやすい平行リンクが干渉して伸びることができない者ですが、アーク溶接ロボットの形は、ここ3、4年で独立関節型が主流になりました。その背景には、ACサーボモータの小型軽量化により、上腕駆動のモータを上腕に搭載しても旋回や下腕駆動部への負荷の影響が軽減されたことや、サーボ制御の技術が飛躍的に向上したことが上げられます。図3独立関節型ロボットの伸び姿勢図4平行リンク型ロボットの伸び姿勢(2000年8月号)256
 | <
| <  |
|  > |
> |  >>
>>