>> P.301
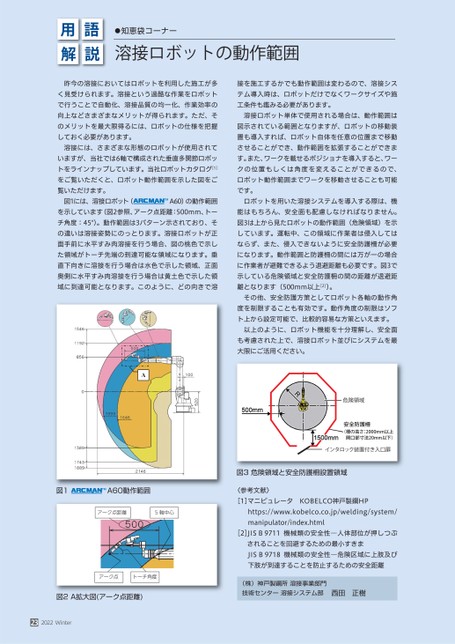
用解語説●知恵袋コーナー溶接ロボットの動作範囲昨今の溶接においてはロボットを利用した施工が多く見受けられます。溶接という過酷な作業をロボットで行うことで自動化、溶接品質の均一化、作業効率の向上などさまざまなメリットが得られます。ただ、そのメリットを最大限得るには、ロボットの仕様を把握しておく必要があります。溶接には、さまざまな形態のロボットが使用されていますが、当社では6軸で構成された垂直多関節ロボットをラインナップしています。当社ロボットカタログ[1]をご覧いただくと、ロボット動作範囲を示した図をご覧いただけます。図1には、溶接ロボット(A60)の動作範囲を示しています(図2参照、アーク点距離:500mm、トーチ角度:45)。動作範囲は3パターン示されており、その違いは溶接姿勢にのっとります。溶接ロボットが正面手前に水平すみ肉溶接を行う場合、図の桃色で示した領域がトーチ先端の到達可能な領域になります。垂直下向きに溶接を行う場合は水色で示した領域、正面奥側に水平すみ肉溶接を行う場合は黄土色で示した領域に到達可能となります。このように、どの向きで溶A接を施工するかでも動作範囲は変わるので、溶接システム導入時は、ロボットだけでなくワークサイズや施工条件も鑑みる必要があります。溶接ロボット単体で使用される場合は、動作範囲は図示されている範囲となりますが、ロボットの移動装置も導入すれば、ロボット自体を任意の位置まで移動させることができ、動作範囲を拡張することができます。また、ワークを載せるポジショナを導入すると、ワークの位置もしくは角度を変えることができるので、ロボット動作範囲までワークを移動させることも可能です。ロボットを用いた溶接システムを導入する際は、機能はもちろん、安全面も配慮しなければなりません。図3は上から見たロボットの動作範囲(危険領域)を示しています。運転中、この領域に作業者は侵入してはならず、また、侵入できないように安全防護柵が必要になります。動作範囲と防護柵の間には万が一の場合に作業者が避難できるよう退避距離も必要です。図3で示している危険領域と安全防護柵の間の距離が退避距離となります(500mm以上[2])。その他、安全防護方策としてロボット各軸の動作角度を制限することも有効です。動作角度の制限はソフト上から設定可能で、比較的容易な方策といえます。以上のように、ロボット機能を十分理解し、安全面も考慮された上で、溶接ロボット並びにシステムを最大限にご活用ください。危険領域安全防護柵(柵の高さ:2000mm以上開口部寸法20mm以下)インタロック装置付き入口扉図1A60動作範囲〈参考文献〉図3危険領域と安全防護柵設置領域アーク点距離5軸中心アーク点トーチ角度図2A拡大図(アーク点距離)232022Winter[1]マニピュレータKOBELCO神戸製鋼HPhttps://www.kobelco.co.jp/welding/system/manipulator/index.html[2]JISB9711機械類の安全性―人体部位が押しつぶされることを回避するための最小すきまJISB9718機械類の安全性―危険区域に上肢及び下肢が到達することを防止するための安全距離(株)神戸製鋼所溶接事業部門技術センター溶接システム部西田正樹
 | <
| <  |
|  > |
> |  >>
>>