>> P.302
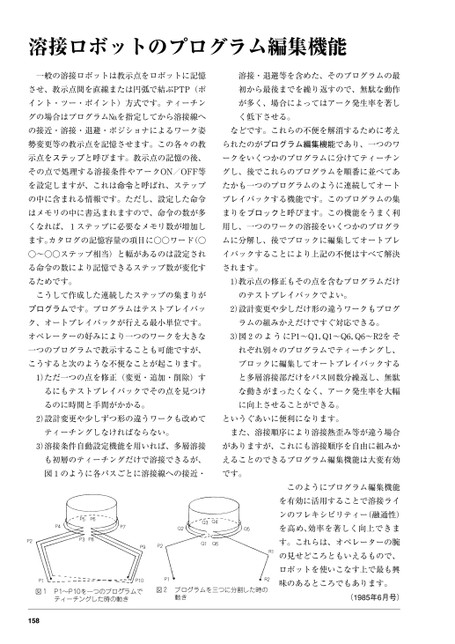
溶接ロボットのプログラム編集機能一般の溶接ロボットは教示点をロボットに記憶溶接・退避等を含めた、そのプログラムの最させ、教示点間を直線または円弧で結ぶPTP(ポ初から最後までを繰り返すので、無駄な動作イント・ツー・ポイント)方式です。ティーチンが多く、場合によってはアーク発生率を著しグの場合はプログラム№を指定してから溶接線へく低下させる。の接近・溶接・退避・ポジショナによるワーク姿などです。これらの不便を解消するために考え勢変更等の教示点を記憶させます。この各々の教られたのがプログラム編集機能であり、一つのワ示点をステップと呼びます。教示点の記憶の後、ークをいくつかのプログラムに分けてティーチンその点で処理する溶接条件やアークON/OFF等グし、後でこれらのプログラムを順番に並べてあを設定しますが、これは命令と呼ばれ、ステップたかも一つのプログラムのように連続してオートの中に含まれる情報です。ただし、設定した命令プレイバックする機能です。このプログラムの集はメモリの中に書込まれますので、命令の数が多まりをブロックと呼びます。この機能をうまく利くなれば、1ステップに必要なメモリ数が増加し用し、一つのワークの溶接をいくつかのプログラます。カタログの記憶容量の項目に○○ワード(○ムに分解し、後でブロックに編集してオートプレ○〜○○ステップ相当)と幅があるのは設定されイバックすることにより上記の不便はすべて解決る命令の数により記憶できるステップ数が変化すされます。るためです。1)教示点の修正もその点を含むプログラムだけこうして作成した連続したステップの集まりがのテストプレイバックでよい。プログラムです。プログラムはテストプレイバッ2)設計変更や少しだけ形の違うワークもプログク、オートプレイバックが行える最小単位です。ラムの組みかえだけですぐ対応できる。オペレーターの好みにより一つのワークを大きな3)図2のようにP1〜Q1,Q1〜Q6,Q6〜R2をそ一つのプログラムで教示することも可能ですが、れぞれ別々のプログラムでティーチングし、こうすると次のような不便なことが起こります。ブロックに編集してオートプレイバックする1)ただ一つの点を修正(変更・追加・削除)すと多層溶接部だけをパス回数分繰返し、無駄るにもテストプレイバックでその点を見つけな動きがまったくなく、アーク発生率を大幅るのに時間と手間がかかる。に向上させることができる。2)設計変更や少しずつ形の違うワークも改めてというぐあいに便利になります。ティーチングしなければならない。また、溶接順序により溶接熱歪み等が違う場合3)溶接条件自動設定機能を用いれば、多層溶接がありますが、これにも溶接順序を自由に組みかも初層のティーチングだけで溶接できるが、えることのできるプログラム編集機能は大変有効図1のように各パスごとに溶接線への接近・です。このようにプログラム編集機能を有効に活用することで溶接ラインのフレキシビリティー(融通性)を高め、効率を著しく向上できます。これらは、オペレーターの腕の見せどころともいえるもので、ロボットを使いこなす上で最も興味のあるところでもあります。(1985年6月号)図1P1〜P10を一つのプログラムでティーチングした時の動き図2プログラムを三つに分割した時の動き158
 | <
| <  |
|  > |
> |  >>
>>