 当サイトにつきましては、スマートフォン、タブレットでの閲覧にも対応しております。
当サイトにつきましては、スマートフォン、タブレットでの閲覧にも対応しております。【新型アーク溶接ロボット】ARCMAN™ A80の紹介
1. はじめに

当社のアーク溶接ロボットは、中厚板分野(建設機械、鉄骨、橋梁、鉄道車両等)をターゲットとして、これまで数多く採用されてきました。
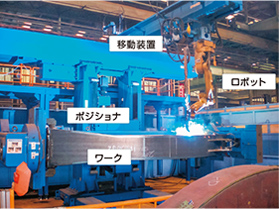
図1に溶接システムの例を示します。中厚板分野での溶接では溶接対象物(ワーク)が大きく、ロボット単独の動作領域ではワークの溶接箇所全てをカバーできないことが多くあります。そのため当社では、ロボットを搭載する移動装置と、溶接箇所を最適な溶接姿勢に位置決めするポジショナとを組み合わせることで、要求される溶接箇所をカバーするように、お客様のワークの大きさや形状などに応じた溶接システムを構築しています。そして搭載するロボットは、システムを構成するのに適したロボットサイズや動特性を備えることを特長としています。
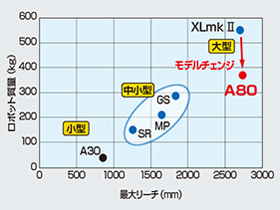
図2は当社のロボットの機種構成を示します。小型ロボットでは、ロボット質量が軽く移動装置への負担が少なく、システムとしては軽量コンパクトにできます。その反面、ロボットの最大リーチが短く動作領域が狭いため、大きなワークへの適用の面で不利になります。大型ロボットではその反対です。そのため、最大リーチ1,300~1,800mmの中小型機が動作領域の広さとロボット質量のバランスがよく、溶接システムを構築する上で多く採用されてきました。しかし一方でロボットの最大リーチを拡大して、ロボットを移動装置に搭載することなくワークの溶接箇所に適用することで、システム構成をよりシンプルにすることができるという点では大型ロボットの価値が高まります。また、造船現場などワークが非常に大きい場合や、ワークの内面など狭隘部材への進入が必要な場合には、小型軽量ロボットを適用することで、これまで溶接工によってされてきた作業を自動化することが可能となります。このように当社ではお客様の溶接へのご要求にお応えしていくために、それぞれのシステムに最も適用しやすいロボットをラインナップしています。
その中で今回は、これまでお客様から高い評価をいただいてきたARCMAN™ XLmkⅡの後継機であるARCMAN™ A80(図3)についてご紹介します。
2. 特長
以下にARCMAN™ A80の主な特長を記します。
なお、各項目に記載されている表記は次の意味を表しています。
【Keep】: 従来機の長所を継承している。
【 Up 】: 従来機から機能向上している。
【New】: 従来機には無い新しい機能、特長となっている。
(1)長いリーチ【Keep】
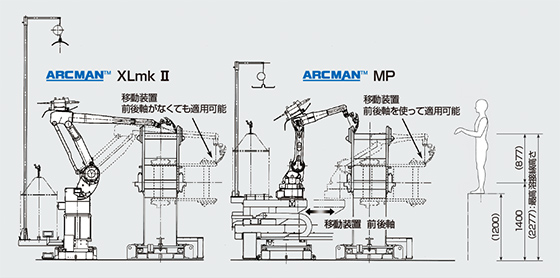
当社標準サイズのARCMAN™ MP(図2「中小型機」)比約1.7倍の最大リーチを活かし、ロボット移動装置の軸数を減らしたシステム構成で大型ワークの溶接が可能になります。図4(左)は、ARCMAN™ XLmkⅡを搭載した、建設機械のフレーム部品を溶接するシステムの導入事例です。大型ワークに対して、ロボットは移動装置前後軸を用いず単体の動作領域を使って要求される溶接箇所全てをカバーができました。一方、ARCMAN™ MPを使用したシステム構成では、ロボットから遠い側の溶接箇所がロボット動作範囲の外に外れるため、ARCMAN™ XLmkⅡを搭載したシステムに対して移動装置に前後軸を追加する必要があります。
本事例ではシステム構成を単純化することで故障発生による設備停止率を低減でき、また保守費用も削減できるなどの効果が期待できることから、ARCMAN™ XLmkⅡを使用した溶接システムが採用されました。
ARCMAN™ A80は、このリーチの長さを踏襲します。ARCMAN™ XLmkⅡと寸法互換を持たせ、お客様の資産である教示プログラムを活用することができます。
(2)下腕フレーム構造のシリアルリンク化
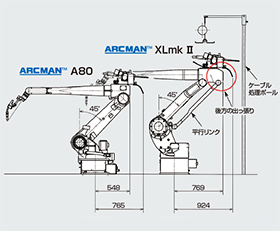
ARCMAN™ A80はシリアルリンク構造を採用しました。ワーク姿勢を変更する際、ロボットは後方に引いた待避姿勢をとります。この際、ロボット後部分がケーブル処理のポール等と干渉することを避けるために後方のスペースが必要になります。平行リンク構造のARCMAN™ XLmkⅡではロボット後部の突起が大きく、後方のスペースをより広く確保する必要がありました。今回、リンク構造を見直し後方の突出部を小さくしたことで、後方のスペースを縮小しシステムの省スペース化に寄与します(図5)。
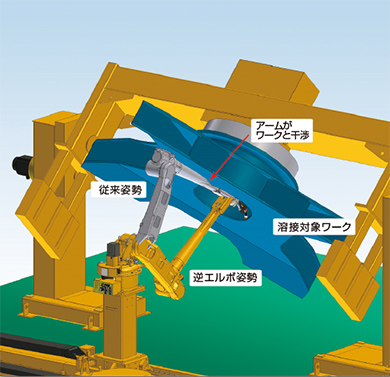
シリアルリンク構造を採用したことにより、ARCMAN™ A80では、逆エルボ(下腕と上腕が一直線にまで伸び切った状態から、さらに上腕を上側に動作させる)姿勢がとれるようになりました。図6は建設機械のフレームを溶接するシステム例です。従来はロボットとワークとの干渉を避けるために移動装置と組み合わせることでロボットの位置を変えていましたが、逆エルボ姿勢を利用してワークの開口部からアームを差し入れることで、よりシンプルな装置構成を実現できます。
シリアルリンク化による部品点数削減および、最新のシミュレーション技術によるフレーム構造の最適化により、ARCMAN™ XLmkⅡに対して、約30%軽量化しました。
当社の溶接ロボットの特長の一つに高精度アークセンサ(溶接時にリアルタイムに溶接線のズレを検知してロボットの動きを補正する機能)があります。高精度アークセンサに必要なロボット剛性を確保するため、これまでは大型ロボットでは平行リンクを採用してきました。ARCMAN™ A80では、最新のシミュレーション技術によるシリアルリンク化&軽量化した高剛性マニピュレータと、より高性能になったCBコントローラとの組み合わせにより従来通りの高精度アークセンサを実現しています。
(3)ケーブル内蔵でロボット周り簡潔化【New】
中厚板の溶接を行うためには、400Aを超える高い溶接電流に耐える太径の溶接用ケーブルやトーチ冷却用の水ホースが必要となります。また、近年では、溶接箇所を検知するためのセンサ類を併用することもあり、ケーブルが増える傾向にあります。従来、これらのケーブル・ホース類は、ロボットフレームの外側に配置されていたため、ロボットの動作に伴って振り回されて、ケーブル類に無理な曲げやねじりがかかることで損傷したり、周囲の機器に引っ掛かるという問題がありました。その対策としてケーブル・ホース類を懸下・ガイドする器具を考慮したシステムレイアウト設計が必要でした。ARCMAN™ A80では、特に重くて太い溶接パワーケーブルをロボットに内蔵(アーム部では機体に這わせる)可能な構造にしました(図3参照)。これにより溶接システムのレイアウト設計の自由度が拡大し、よりロボット溶接に適したレイアウトとすることが可能となります。
(4)CBコントローラ 【New】
ARCMAN™ A80は、昨年本誌でご紹介したCBコントローラとの組み合わせでの発売を予定しております。
対応するCBコントローラの主な特長は下記の通りです。
なお、CBコントローラの詳細については
ぼうだより 技術がいどライブラリー 技術レポートVol.57 2016-4 【新型コントローラ】CBコントローラの紹介をご参照ください。
3.おわりに
本稿では、発売直前のロボットに関して紹介しました。近々、皆様とお会いできると思いますので、どうぞご期待ください。
iPhone/iPad、Android用デジタルカタログ
<専用ビューアが必要です>
スマートフォン、タブレットの方は、専用ビューアをダウンロードしてから閲覧ください。

