~創立70周年~ 社員への思いは一層強く、
さらなる自動化と安全を追求していく
第11回『 自動車用亜鉛めっき鋼板の溶接について』
naeclose 代表・デザイナー 西 紗苗さん
学生フォーミュラ日本大会2025に出展
 当サイトにつきましては、
当サイトにつきましては、機械安全における最小距離
生産現場において、作業者が安心して業務に従事できる環境を整えるためには、機械と人との「距離」の確保が極めて重要です。たとえ安全柵やインターロック付き施錠扉によって物理的に隔てられていたとしても、扉と機械との距離が不適切であれば、扉を開けて侵入した際に作業者が停止前の機械に巻き込まれる危険性があります。
このようなリスクを未然に防ぐために設定されるのが「最小距離」です。
最小距離とは、危険な機械機能が完全に停止する前に人または人体部位が危険区域に到達することを防ぐために、安全防護物と危険区域との間に必要な距離を指します。安全防護物には、セーフティライトカーテンやインターロック付きガードなどが含まれます。
最小距離は、安全性を確保するうえで不可欠な設計要素であり、機械と人との安全な共存を実現するための基本的な指針となります。
セーフティライトカーテンを例に、最小距離の算出方法を紹介します。ライトカーテンは光軸センサによって危険区域への侵入を検知し、機械を非常停止させる装置です。作業者の動作と機械の停止性能を考慮して、以下の式で最小距離を求めます。
| S = K × T + C |
S:最小距離 (mm)
K:侵入速度(mm/s)
※歩行速度として1600mm/sが定義される
T:総合システム停止性能(秒)
C:侵入距離(mm)
※人体部位が検出前に危険区域へ接近できる距離
仮に総合システム停止性能が1.5秒、セーフティライトカーテンの光軸ピッチが40mmの場合、作業者の腕がライトカーテンの内側に入ることができ、腕の長さ分だけ危険領域に近付く可能性があります。このような状況を考慮すると、最小距離Sは以下のように算出されます。
| S = 1600 × 1.5 + 850 = 3250mm (850mmは標準的な腕の長さとされる値) |
以上は、現行JIS規格に基づく考え方です。現行JIS規格は静的な危険源を前提としていますが、最新のISO 13855:2024では、協働ロボットや無人搬送車などの動的な危険源を考慮し、双方向の接近を前提とした設計が求められています。これにより、最小距離の考え方や算出式も変更されています。
国内法令や既存設備との整合性を重視する場合はJIS規格、新規設計や国際展開を意識する場合はISO規格を採用するなど、状況に応じた使い分けが必要となります。
当社の溶接ロボット「」では、最小距離を確保したインターロック付きガードの設置をお願いしています。下図は、ロボットの動作範囲(危険領域)と安全防護柵の設置領域を示したものです。入口扉と危険領域の距離である1500mmは最小距離を加味した距離となっています。
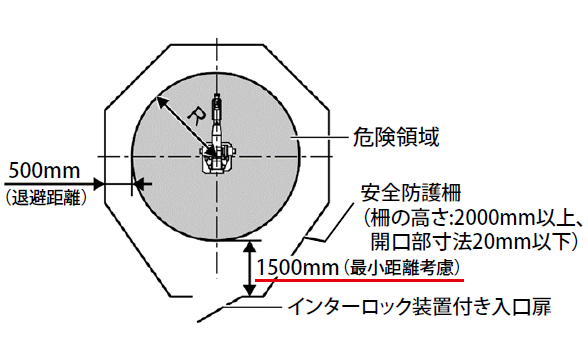
危険領域:ロボットアームの可動範囲や溶接トーチの到達範囲
退避距離:万が一の際に作業者が避難できるスペース(安全規格に基づき500mm以上)
最小距離の確保は、作業者の安全と命を守るために不可欠な要素です。
当社は、お客様の生産性向上などのご要望に応え続けるだけでなく、安心・安全に使っていただける溶接ロボットシステムを追求し、ご提案いたします。
参考文献
・JIS B 9715:2013:人体部位の接近速度に基づく安全防護物の位置決め
・JIS B 8433-2:2015:産業用ロボットのための安全要求事項―第2部:ロボットシステム及びインテグレーション
・ISO 13855:2024:人体の接近に対応した安全防護物の位置決め